IPMSM 8極12スロット/10極12スロット 解析結果¶
以下に [CITE2025] により公開されている結果と,[paper2025] で紹介された解析結果をまとめます。
解析メッシュ図¶
技術報告 [CITE2025] では,解析メッシュ図は提示していませんが,ここでは例として [CITE2025] と [paper2025] で使用したメッシュ図を示します。
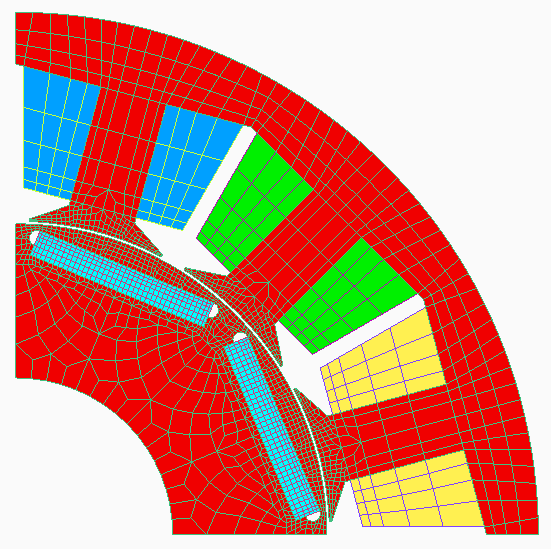
図 90 IPM8P12Sモデル 2Dメッシュ図¶
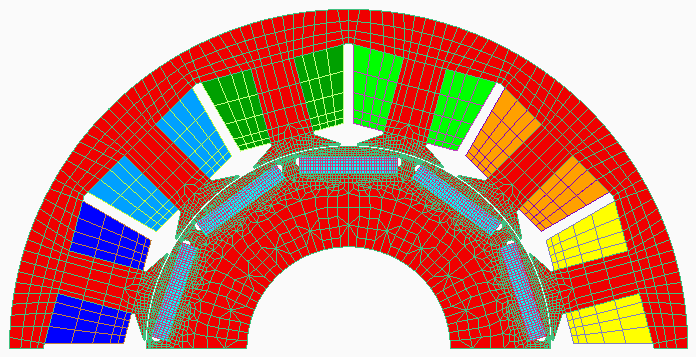
図 91 IPM10P12Sモデル 2Dメッシュ図¶
注意
以下の結果は35A300に近いBHカーブを使用した結果のため,35A300の結果とは多少の差異が出る可能性があります。後日30A300の結果と差し替え予定です。
無負荷誘起電圧¶
無負荷時の結果として,無負荷誘起電圧( \(5000 min^{-1}\) )の結果を示します。
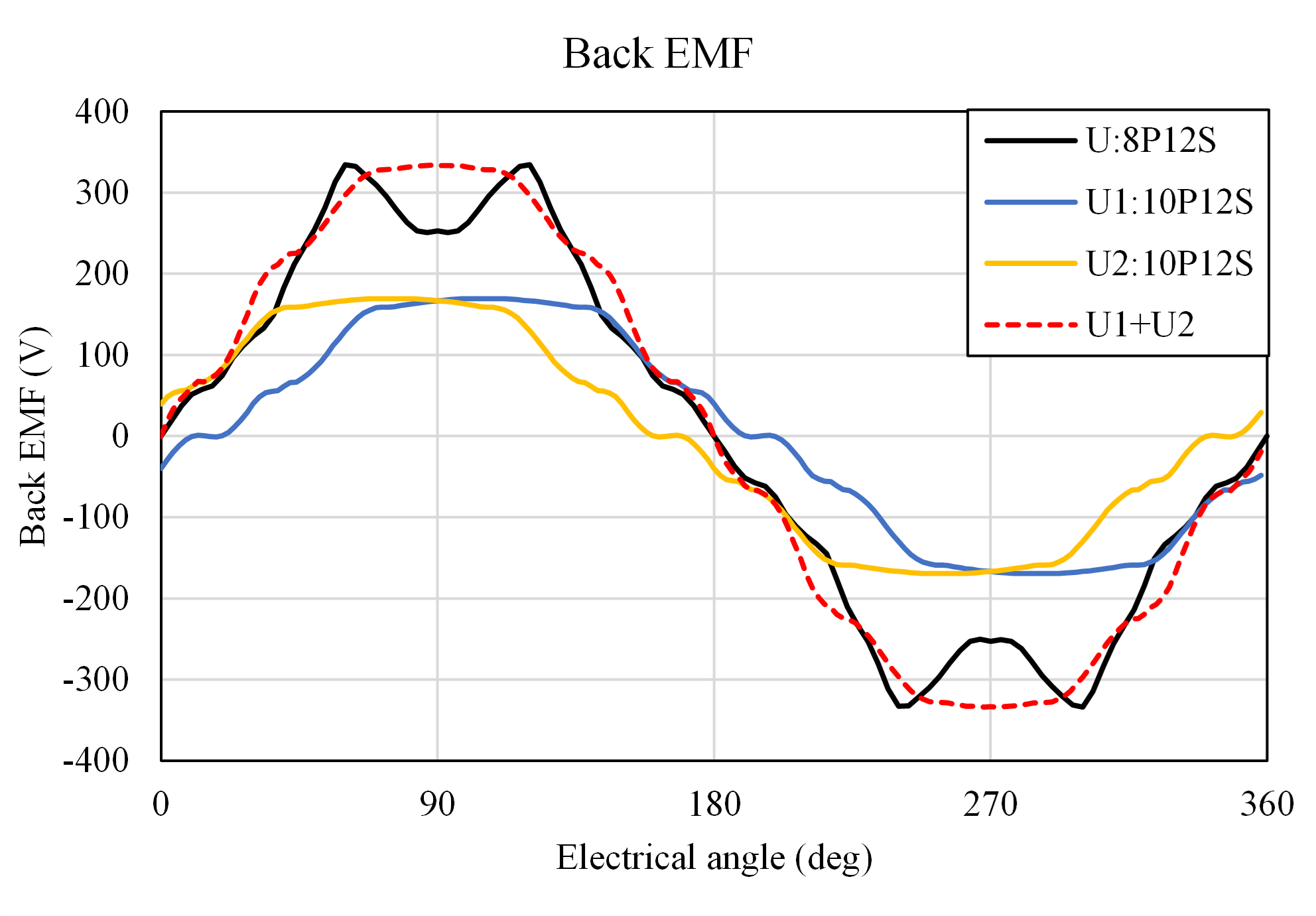
図 92 無負荷相誘起電圧 (出典:[paper2025])¶
技術報告に記載はありませんが,参考までに相誘起電圧の成分を測定結果と比較して示します。
また,コイル鎖交磁束をdq変換したd軸成分より算出したd軸磁石磁束も示します。
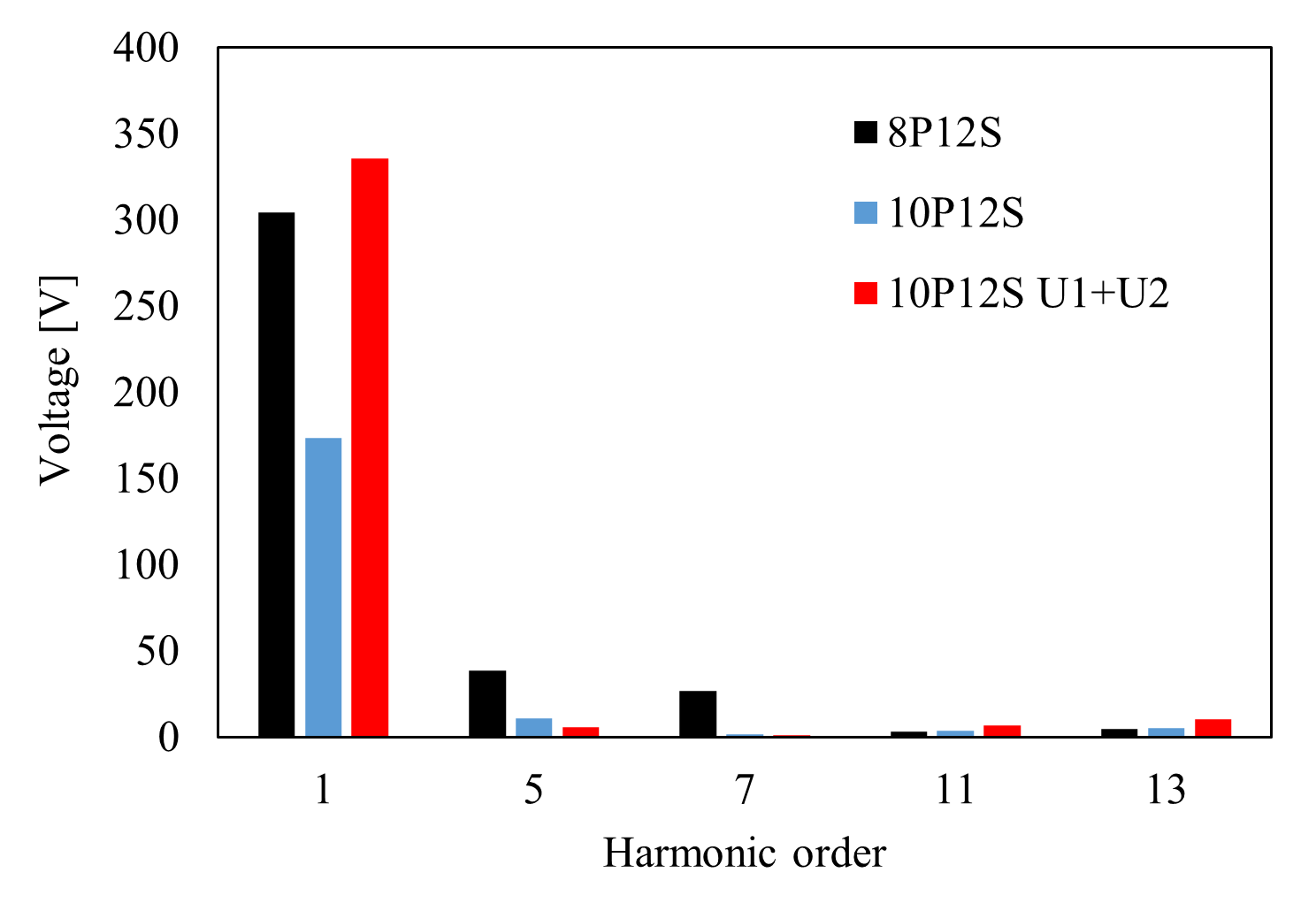
図 93 相誘起電圧FFT結果の比較¶
次数 |
8極 |
10極 |
10極 U1+U2 |
|---|---|---|---|
1 |
304.39 |
173.59 |
335.43 |
5 |
38.42 |
11.06 |
5.69 |
7 |
26.67 |
1.73 |
0.93 |
11 |
3.31 |
3.46 |
6.70 |
13 |
4.72 |
5.46 |
10.56 |
\(\psi_m\) (mWb) |
8極 |
10極 U1+U2 |
|---|---|---|
178.15 |
156.99 |
コギングトルク¶
スロットコンビネーションが異なるため,10極12スロットモータの方が8極12スロットモータよりも低減されています。
参考情報として,8極12スロットモータのように,極数とスロット数が2:3のモータではギャップ部の周方向分割数を最小公倍数6の倍数とするとコギングトルクの周期性が確保でき精度が得られることが知られています。同様に10極12スロットモータの場合,5:6であるため最小公倍数30の倍数でギャップ部を分割すると,精度良いコギングトルク結果が得られます。
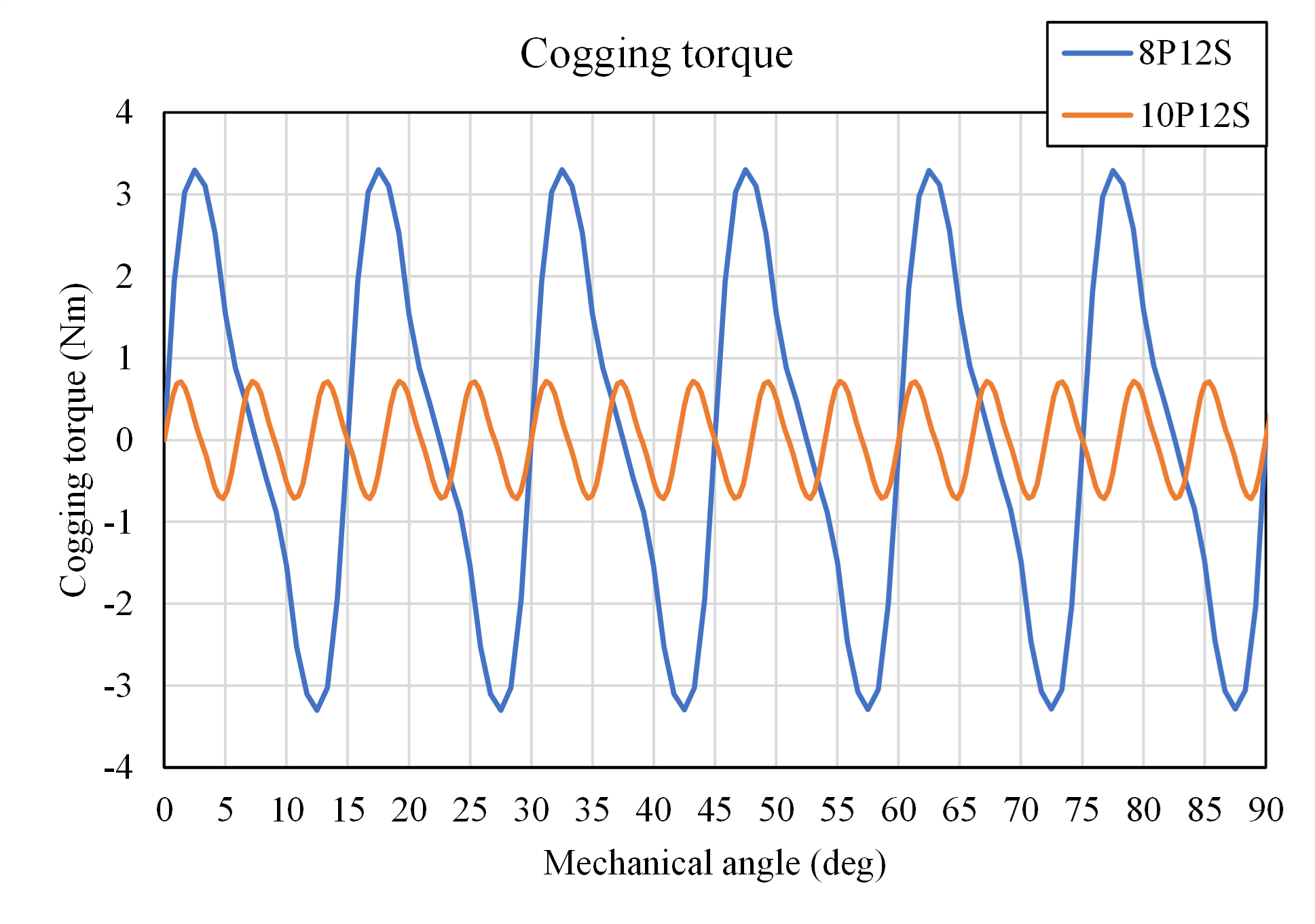
図 94 コギングトルク波形 (出典:[paper2025])¶
8極 |
10極 |
|
|---|---|---|
peak-to-peak (Nm) |
6.60 |
1.43 |
トルク特性¶
8極48スロットモータと軸長を合わせるために本提案モータも50mmとしているため,最大電流120Armsでの最大トルクは8極12スロットモータで89Nm,10極12スロットモータで92.9Nmとおよそ半分の値となっています。
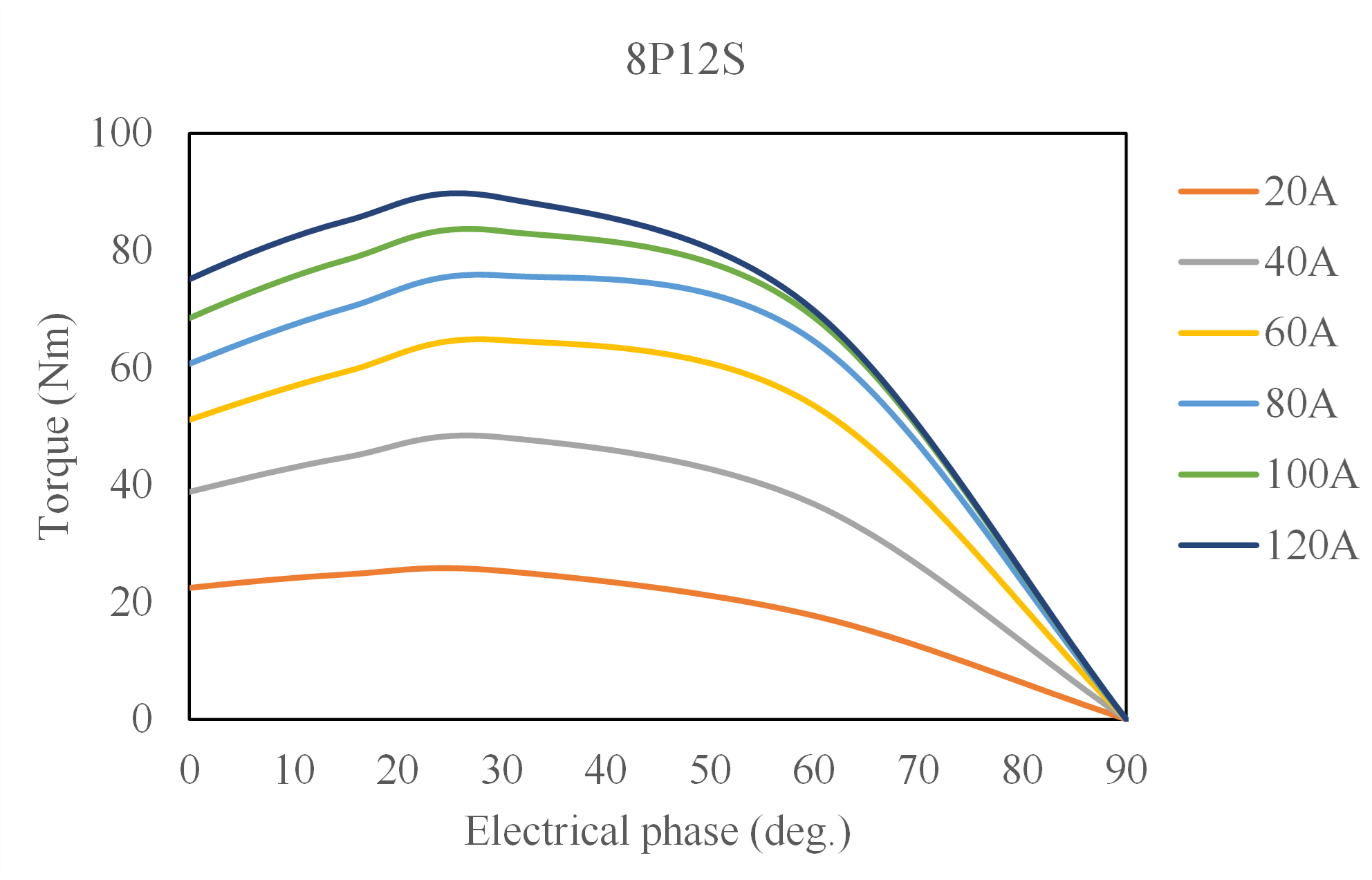
図 95 8極12スロットモータ トルク―電流進角特性 (出典:[paper2025])¶
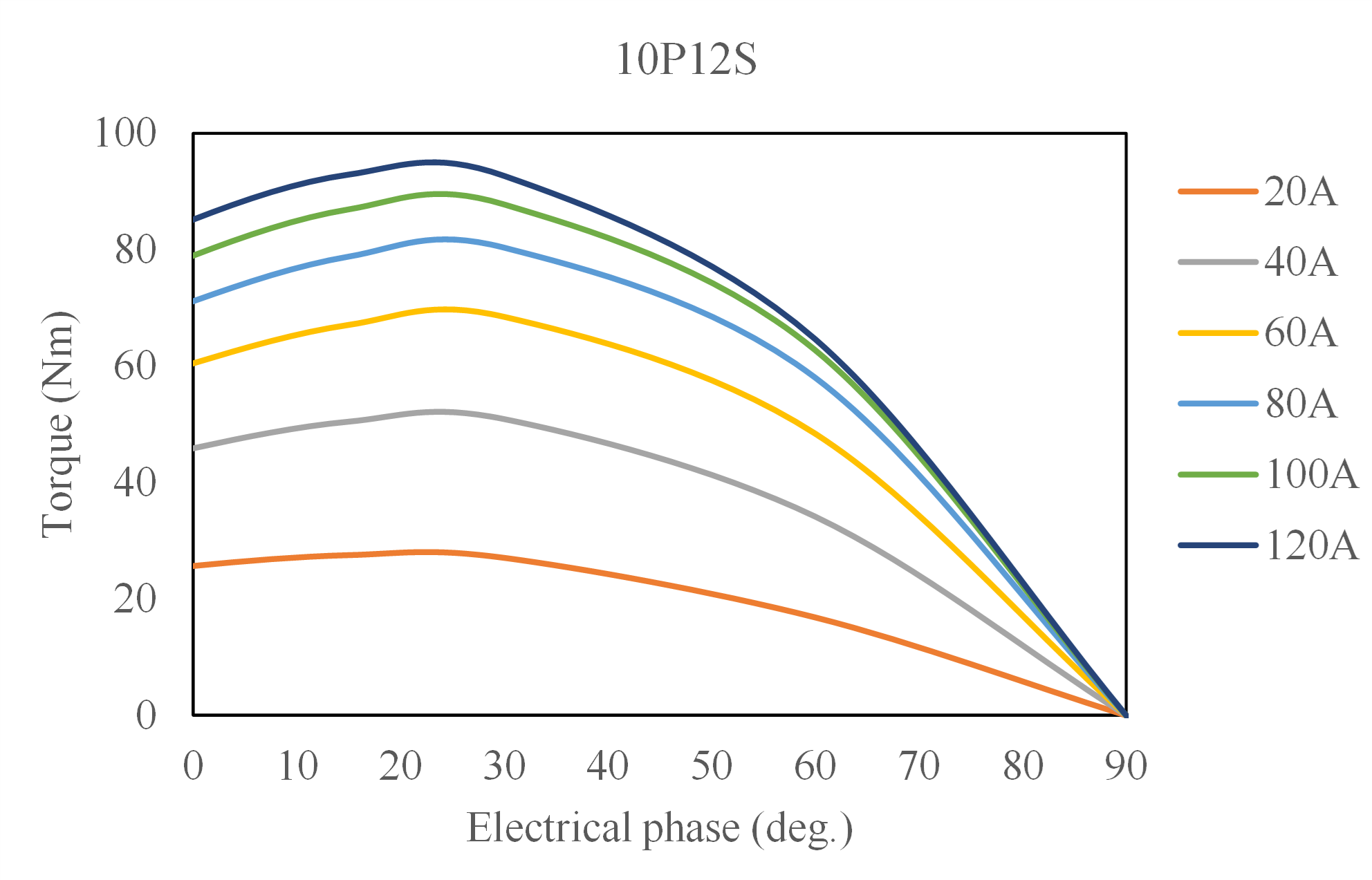
図 96 10極12スロットモータ トルク―電流進角特性 (出典:[paper2025])¶
コギングトルク同様8極12スロットモータのトルクリプルが大きいです。図中の「10P12S in phase」と「10P12S phase shift」は,ぞれぞれ図 二重三相モータの巻線構造 (出典:[paper2021]) での(a) 同相: In-phase dual 3-phaseと(b) 位相シフト:phase-shift dual 3-phaseに対応します。位相をシフトした方が平均トルクも大きく,格段にトルクリプルも低減できていることが確認できます。
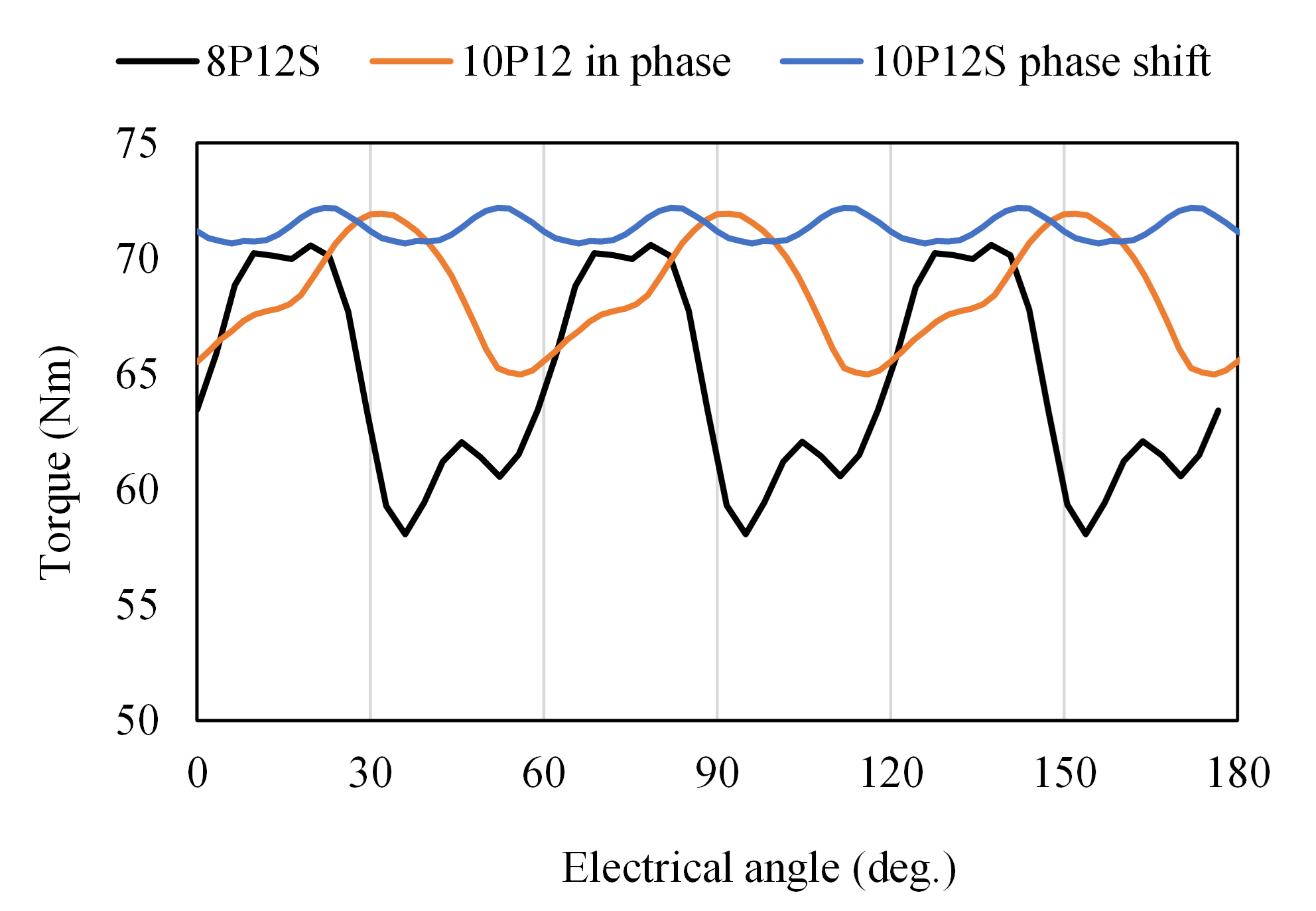
図 97 8極および10極12スロットモータ トルク波形 電機子電流60Arms,電流進角30deg.(出典:[paper2025])¶